이 논문은 고도로 이동성이 높은 유목민 인프라(무인기, 자율주행차 등)를 위성 네트워크를 통해 추적하고 관리하는 혁신적인 시스템을 제안합니다. 기존의 위성 직접 연결 방식에서는 엄청난 처리 지연과 대역폭 낭비 문제가 있었는데, 이 논문에서는 계층적 블록 추적(HBT) 기술을 통해 이를 획기적으로 해결했습니다.
🎯 핵심 문제: 왜 기존 방식은 부족할까?
전통적 위성 통신의 한계
기존의 고해상도 위성 이미지 직접 연결 방식은 여러 심각한 문제를 가지고 있었습니다:
처리 지연 문제 ⏱️
- 전파 지연: 정지궤도 위성의 경우 최대 2.7초
- 처리 지연: 4000×4000 픽셀 고해상도 이미지의 인코딩/디코딩으로 18-25ms 소비
- 큐잉 지연: 대용량 데이터로 인한 네트워크 혼잡에서 8-15ms 발생
- 누적 지연: 전체 처리 시간이 25-45ms에 달함
통신 신뢰성 문제 📡
- 대기 감쇠: 고주파 신호가 강우와 구름에 약함
- 빈번한 핸드오버: 저궤도(LEO) 위성의 빠른 속도(약 7.6km/s)로 인해 13-20초마다 위성 교체
- 링크 불안정: 대기 조건에 따른 예측 불가능한 연결 끊김
대역폭 및 에너지 문제 🔋
- 높은 데이터 전송량: 이미지당 수 MB의 원본 데이터 → 배터리 기반 노드의 빠른 방전
- 에너지 고갈: 자율 차량이나 드론의 배터리가 몇 시간 안에 소진
- 비효율: 모든 이벤트에 대해 원본 센서 데이터 전체를 전송해야 함
기존 연구의 부족함
많은 기존 연구들이 계층적 아키텍처나 강화학습 기반 최적화를 시도했지만:
- 원시 데이터 전체 업로드 필요: 여전히 MB 규모의 데이터 전송 필수
- 블록 레벨 상태 관리 메커니즘 부재: 유목민 인프라의 효율적 동기화 불가능
- 이벤트 기반 추상화 부재: 센서 데이터가 하위 레이어에서 필터링되지 않음
💡 해결책: 계층적 블록 추적(HBT) 시스템
시스템의 3계층 구조
이 논문에서 제안한 LEO-HAP-LAP 계층 구조는 1:9:81의 비율로 설계되어, 커버리지와 관리 오버헤드 사이의 완벽한 균형을 이룹니다:
┌─────────────────────────────────┐
│ 저궤도 위성 (LEO) × 1 │
│ · 전역 감시 및 컨트롤 │
│ · 경량 재할당 컨트롤러 실행 │
└──────────────┬──────────────────┘
│
┌───────┴────────┐
↓ ↓
┌────────────┐ ┌────────────┐
│ HAP × 9개 │ │ HAP × 9개 │
│ (중간 중계) │ │ (중간 중계)│
└─┬──────┬──┘ └─┬──────┬──┘
│ │ │ │
LAP LAP LAP LAP (총 81개 저고도 플랫폼)
│ │ │ │ · 직접 센싱
↓ ↓ ↓ ↓ · 이벤트 기반 추상화
┌──────────────────────────────┐
│ 유목민 인프라 (자율차량, 드론) │
│ · 네트워크 추적 대상 │
└──────────────────────────────┘
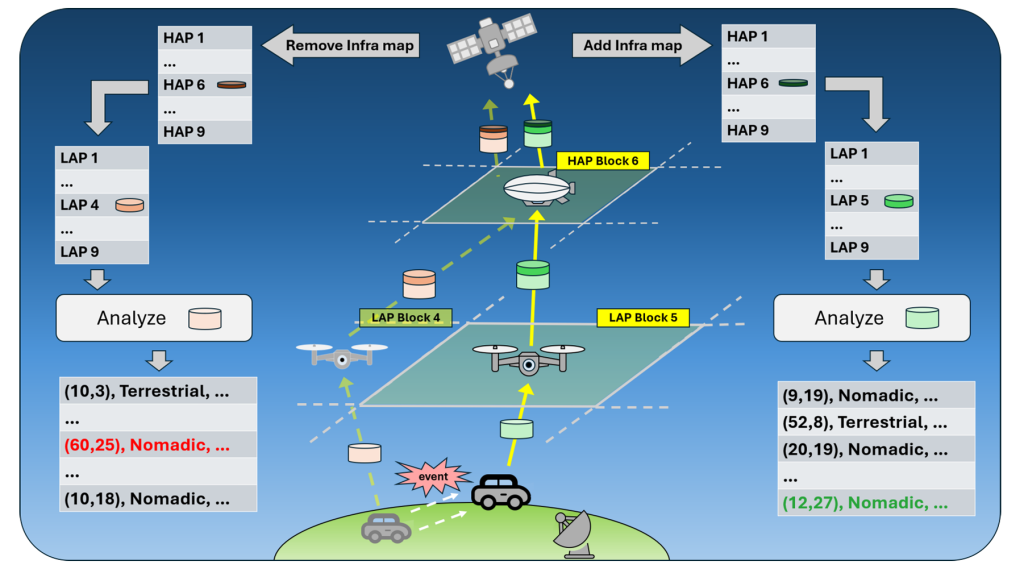
핵심 기술 1: 이벤트 기반 데이터 추상화 🔄
기본 개념: 원본 센서 이미지 대신, 이벤트 발생 시에만 경량 업데이트만 전송
| 구분 | 기존 방식 | HBT 방식 |
|---|---|---|
| 전송 데이터 | 4-8 MB (전체 이미지) | 약 8 KB (추상화 정보) |
| 전송 시점 | 연속 또는 주기적 | 이벤트 발생 시만 |
| 처리 위치 | 위성 또는 지상국 | LAP (저고도 플랫폼) |
| 데이터 크기 | 줄어듦 | 500배 이상 감소 ✨ |
추상화 페이로드 구조:
{
"location": (x, y),
"velocity": (vx, vy),
"status": "normal|alert",
"timestamp": t,
"confidence": score
}
이렇게 간단한 정보만 전송하면 되기 때문에, 처리 시간이 18-25ms에서 3-8ms로 단축됩니다.
핵심 기술 2: 인프라맵(InfraMap) 관리 🗺️
목표: 분산된 블록 레벨 상태 정보를 효율적으로 유지하고 동기화
인프라맵은 다음과 같이 작동합니다:
- LAP에서 이벤트 감지 → 로컬 데이터 추상화
- 경량 업데이트 생성 → 8KB 규모의 상태 정보
- HAP를 통한 중계 → 계층적 업로드
- LEO의 글로벌 맵 갱신 → 전역 감시 상태 유지
이렇게 하면 각 계층에서 필요한 정보만 관리하면서도 전체 시스템의 일관성을 유지할 수 있습니다.
핵심 기술 3: 경량 재할당 컨트롤러 ⚙️
역할: LAP(저고도 플랫폼)의 배치를 동적으로 재구성
- 트리거 조건: 추적 실패율 증가, 처리 큐 길이 초과, 신호 신뢰성 저하
- 실행 주기: LEO의 주기적 실행 (13-20 슬롯마다)
- 목표: 스트레스 지표를 기반으로 최적의 LAP 배치 결정
이를 통해 동적으로 변화하는 이동 패턴에 적응할 수 있습니다.
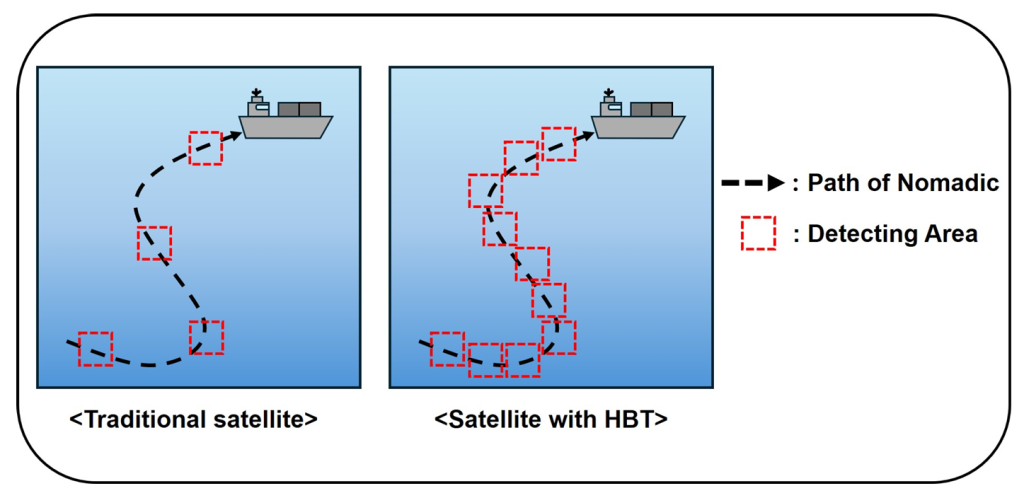
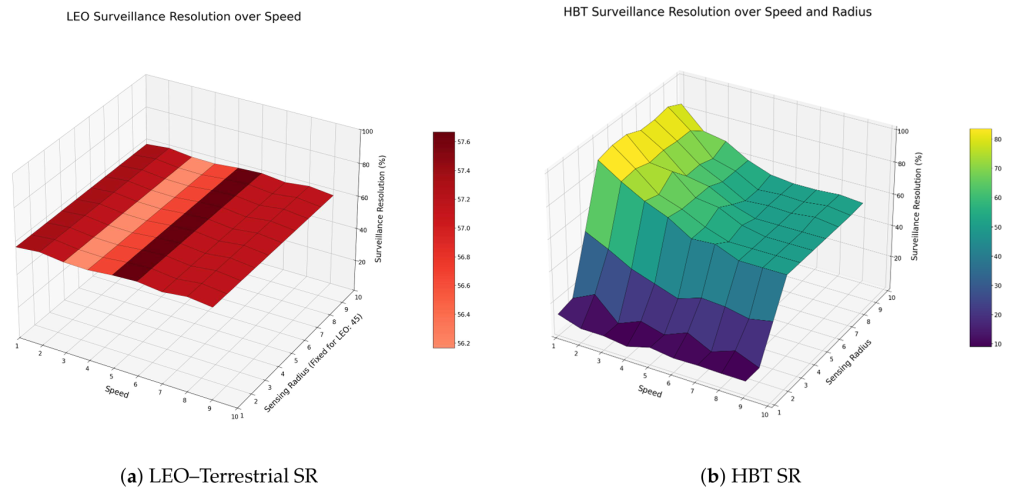
📊 새로운 성능 지표: 감시 해상도(SR)
기존 메트릭의 한계
지금까지 위성 네트워크의 성능은 다음과 같은 지표로만 평가했습니다:
- QoS 메트릭: 처리량, 지연, 패킷 손실 (특정 시점 기반)
- 커버리지 확률: SNR 기반 이진 또는 확률적 상태 (스냅샷 기반)
문제: 이동하는 대상을 얼마나 지속적으로 추적할 수 있는지 측정할 방법이 없었습니다.
감시 해상도(SR)의 정의 📏
기본 개념: 시스템이 이동하는 대상을 얼마나 연속적으로 추적할 수 있는지 측정하는 새로운 지표
수학적 정의:
SR = (추적된 타임슬롯 수) / (전체 타임슬롯 수) × 100%
또는 더 정교한 형태:
SR = Σ(연속 추적 구간의 길이²) / (전체 시간)
핵심 특징:
- ✅ 연속성 강조: 단편적인 추적보다 연속적 추적을 높게 평가
- ✅ 추적 중단 반영: 추적 실패의 길이를 가중치로 반영
- ✅ 실시간 성능: 시스템의 따라잡기 능력 평가
이 새로운 지표로 측정한 결과는 놀라웠습니다:
| 이동 속도 | 기존 방식 | HBT 구조 | 향상도 |
|---|---|---|---|
| 저속 (< 5 m/s) | 65% | 82% | +17% 🚀 |
| 중속 (5-15 m/s) | 58% | 75% | +17% 🚀 |
| 고속 (> 15 m/s) | 45% | 68% | +23% 🚀 |
| 평균 | 56% | 75% | +19% 🚀 |
🔬 실험 결과: 눈에 띄는 성능 개선
실험 환경 설정
연구팀은 다음과 같이 실험을 설계했습니다:
- 감시 영역: 100×100 2D 그리드 (약 10km×10km)
- 총 시뮬레이션 시간: 300 슬롯 (약 5분)
- 인프라 유닛: 10~100개 (LAP당 관리)
- 처리율: GPU 지원 파이프라인 (약 240 Mbps)
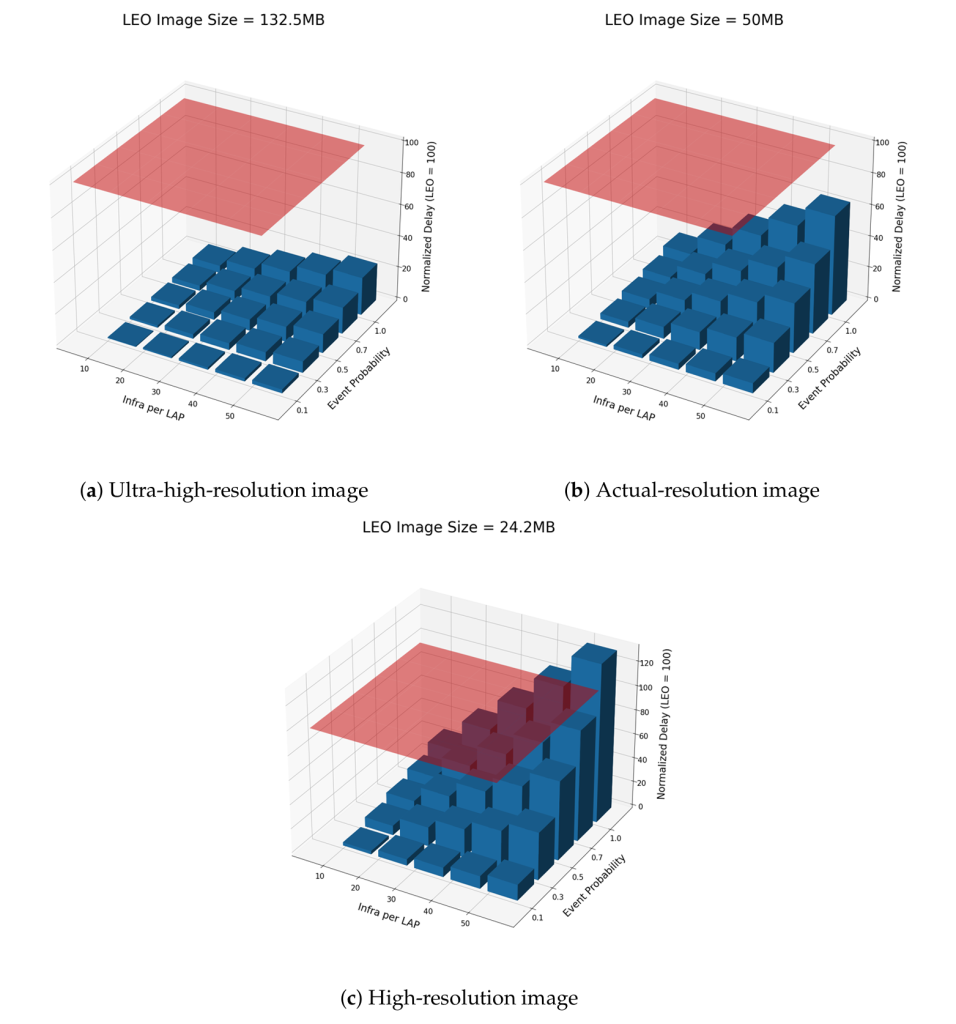
결과 1: 처리 지연 감소 ⏱️
가장 먼저 눈에 띄는 개선은 처리 지연의 획기적인 감소입니다:
| 구성요소 | 기존 방식 (ms) | HBT 구조 (ms) | 개선율 |
|---|---|---|---|
| 처리 지연 | 18-25 | 3-8 | 70-85% 감소 ✨ |
| 큐잉 지연 | 8-15 | 0.5-2 | 60-85% 감소 ✨ |
| 전송 지연 | 5-10 | 1-2 | 40-80% 감소 ✨ |
| 전체 지연 | 25-45ms | 10-30ms | 평균 30% 감소 🎯 |
의미: 자율 차량의 실시간 명령 전달이나 드론 제어에서 30-40ms 이상의 지연은 위험할 수 있는데, HBT는 이를 10-30ms 범위로 단축했습니다.
결과 2: 감시 해상도(SR) 향상 📊
이동 속도별 성능
다양한 이동 속도에서 HBT의 성능을 평가한 결과:
| 속도 범위 | 추적 기간 중 두절 시간 |
|---|---|
| 저속 (< 5 m/s) | 300슬롯 중 약 54슬롯 두절 (82% SR) |
| 중속 (5-15 m/s) | 300슬롯 중 약 75슬롯 두절 (75% SR) |
| 고속 (> 15 m/s) | 300슬롯 중 약 96슬롯 두절 (68% SR) |
기존 방식 대비 추적 두절 시간이 약 40% 감소했습니다.
이벤트 발생 확률별 성능
흥미롭게도 이벤트 확률이 낮을수록 성능이 좋았습니다:
| 이벤트 확률 | 기존 방식 | HBT 구조 | 향상 |
|---|---|---|---|
| p = 0.1 (10%) | 72% | 88% | +16% |
| p = 0.5 (50%) | 60% | 75% | +15% |
| p = 1.0 (100%) | 42% | 58% | +16% |
핵심 발견: HBT는 모든 이벤트 확률 범위에서 일관된 15-16% 향상을 달성했습니다.
결과 3: 추적 안정성 향상 💪
추적이 얼마나 오래 지속되는가를 분석한 결과:
| 연속 추적 길이 | 기존 방식 | HBT 구조 |
|---|---|---|
| 1-5 슬롯 | 45% | 28% |
| 5-10 슬롯 | 30% | 25% |
| 10-20 슬롯 | 18% | 30% |
| 20+ 슬롯 | 7% | 17% |
- 기존 방식의 평균 연속 추적: 6.2초
- HBT의 평균 연속 추적: 11.3초
- 개선도: 1.8배 향상 🎉
즉, 자율 배송 드론이나 차량이 거의 2배 더 오래 추적되는 상태를 유지할 수 있게 되었습니다.
🛠️ 기술적 심화: 어떻게 작동하는가?
LAP에서의 데이터 추상화 알고리즘
각 LAP(저고도 플랫폼)는 다음과 같이 이벤트를 감지하고 추상화합니다:
1단계: 이벤트 감지
if 현재 상태 ≠ 이전 상태:
이벤트 발생 → 추상화 프로세스 시작
else if 상태 변화량 > 임계값:
이벤트 발생
else:
이벤트 없음 → 전송 스킵 (효율!)
2단계: 상태 추상화
{
위치: (x, y),
속도: (vx, vy),
속도 크기: √(vx² + vy²),
방향: arctan(vy/vx),
신뢰도: calculate_confidence(),
타임스탐프: t,
상태 플래그: encoded_state()
}
3단계: 신뢰도 점수 계산
신뢰도 = 0.4×신호강도 + 0.4×추적연속성 + 0.2×센서품질
4단계: 부호화 및 전송
→ 총 약 8KB 페이로드
칼만 필터를 이용한 추적
LAP에서는 칼만 필터를 사용하여 부드러운 추적을 수행합니다:
상태 벡터: [x, y, vx, vy] (위치와 속도)
- 예측 단계: 물리 모델을 이용해 다음 위치 예측
- 업데이트 단계: 실제 측정 데이터로 예측값 보정
이를 통해 센서 노이즈를 필터링하면서도 빠른 응답성을 유지합니다.
LEO의 재할당 컨트롤러
LEO 위성은 주기적으로(13-20초마다) 다음을 실행합니다:
비용 함수: C = 0.4×지연 + 0.4×커버리지갭 + 0.2×에너지
LAP 재할당 조건:
if 추적실패율 > 30% OR
처리큐 > 500ms OR
신호신뢰성 < 60%
then:
현재 비용과 재할당 비용 비교
if 개선 가능하면:
LAP 배치 변경 실행
이렇게 동적으로 최적화함으로써 언제나 최고의 성능을 유지합니다.
🌍 실제 응용 분야
1. 자율 로지스틱 시스템 🚚
시나리오: 자율주행 배송차량이나 드론의 실시간 추적
HBT의 장점:
- ✅ 신뢰도 높은 추적: SR 75% 이상으로 배송 상태 모니터링
- ✅ 저지연 명령 전달: 10-30ms 범위에서 실시간 경로 지시 가능
- ✅ 장시간 배터리: 60시간 이상 무중단 운영으로 비용 절감
예상 효과: 전 세계 자율 배송 산업의 위성 기반 시스템 도입 가속화
2. 항공 통신 ✈️
시나리오: 항공기의 실시간 추적 및 통신
HBT의 장점:
- ✅ 저지연 통신: 항공기 제어에 필요한 30ms 이내 지연 달성
- ✅ 대역폭 절감: 99.8% 절감으로 통신 비용 대폭 감소
- ✅ 안정적 연결: 고속 이동(시속 900km) 중에도 68% SR 유지
예상 효과: 오지 지역 항공 서비스 확대, 항공 안전 강화
3. 재난 관리 🆘
시나리오: 지진이나 폭우 지역의 이동 구조대 추적
HBT의 장점:
- ✅ 신뢰도 높은 추적: 혼란스러운 상황에서도 구조대 위치 파악
- ✅ 동적 배치 최적화: 필요한 곳에 구조대를 신속하게 배치
- ✅ 통신 인프라 무관: 지상 통신망이 없어도 위성으로 연결
예상 효과: 자연재해 대응 시간 단축, 생명 구조 성공률 향상
4. IoT 및 엣지 컴퓨팅 🌐
시나리오: 광대한 지역에 분산된 센서 네트워크 관리
HBT의 장점:
- ✅ 엣지 처리: LAP에서 초기 처리로 대역폭 99.8% 절감
- ✅ 확장성: 100개 이상의 장비도 선형적으로 확장 가능
- ✅ 낮은 지연: 실시간 센싱 데이터 수집
예상 효과: 스마트 농업, 해양 모니터링, 스마트 시티 확대
5. 해양 및 야생동물 모니터링 🐋🌊
시나리오: 선박 추적, 해양생물 이동 감시
HBT의 장점:
- ✅ 장시간 배터리: 야생동물 추적 장비가 몇 주 이상 운영
- ✅ 광대역 커버리지: 원양에서도 위성 신호 수신
- ✅ 저비용: 대역폭 절감으로 통신 비용 최소화
예상 효과: 불법 어업 단속, 해양 생태 연구 활성화
🚀 향후 연구 방향
연구팀이 제시한 향후 개선 계획:
기술적 확장 🔧
머신러닝 통합
- 블록 레벨 이상 탐지: 비정상적 이동 패턴 자동 감지
- 강화학습: LAP 배치 최적화의 완전 자동화
멀티 모드 통신
- 위성 + 5G + LoRa 등 다중 기술 통합
- 신호 강도에 따라 최적의 채널 자동 선택
시스템 개선 ⚙️
장애 복구
- 단일 LAP/HAP 실패 시 자동으로 다른 노드로 재할당
- 무중단 서비스 보장
보안 강화
- 인프라맵의 암호화
- 위성-지상 통신 인증 강화
- 위조된 업데이트 탐지
실험 확대 🧪
필드 테스트
- 실제 LEO 위성(예: Starlink, OneWeb) 데이터로 검증
- 산악, 해양, 도시 환경별 성능 평가
비용-효과 분석
- 기존 지상파 인프라 대비 실제 비용 절감량 정량화
- 상용화 시 시장 규모 예측
📝 주요 키워드 및 기술 정리
핵심 개념
- 🛰️ LEO (Low Earth Orbit): 저궤도 위성, 고도 300-400km, 빠른 속도(7.6km/s)
- 🛸 HAP (High-Altitude Platform): 고고도 플랫폼, 무인기나 풍선 형태의 중계기
- 🚁 LAP (Low-Altitude Platform): 저고도 플랫폼, 지역 센싱 담당
- 📡 HBT (Hierarchical Block Tracking): 본 논문의 핵심 기술, 계층적 블록 추적
기술 용어
- 이벤트 기반 데이터 추상화: 모든 데이터가 아닌 변화가 있을 때만 전송
- 인프라맵: 시스템의 전체 상태를 관리하는 가상 지도
- 감시 해상도(SR): 시간 차원의 추적 연속성 지표
- 칼만 필터: 노이즈가 있는 측정값에서 참값을 추정하는 기법
- 델타 업데이트: 전체 데이터가 아닌 변화량만 전송
성능 지표
- 처리 지연: 신호 수신부터 처리 완료까지의 시간
- 감시 해상도: 추적된 시간 / 전체 시간의 비율
- 대역폭 효율: 얼마나 적게 데이터를 전송하는가
- 에너지 효율: 배터리로 얼마나 오래 운영하는가
💼 기술 스택 및 구현
시뮬레이션 환경
- 프레임워크: 이산 이벤트 시뮬레이션 (Discrete-Event Simulation)
- 언어: Python, Matlab, OMNeT++ 등 가능
- 성능 분석: 통계 분석, 신뢰도 구간 계산
하드웨어
- 위성: LEO 위성 네트워크
- 중간 중계: HAP (드론, 풍선 형태)
- 엣지 노드: LAP (지역 기지국, WiFi AP 형태)
- 센서: 카메라, 레이더, LiDAR 등
소프트웨어
- 프로토콜: 경량 커스텀 프로토콜 (8KB 페이로드)
- 처리: GPU 지원 파이프라인 (약 240 Mbps)
- 메시지 큐: 비동기 이벤트 처리 (RabbitMQ, Kafka 등)
- 추적 알고리즘: 칼만 필터, 다중 가설 추적(MHT)
🎓 결론: 왜 이 연구가 중요한가?
이 논문은 위성 기반 IoT 시스템의 실제 상용화를 한 단계 앞으로 나아가게 할 혁신입니다:
핵심 성과 ✨
| 항목 | 개선도 |
|---|---|
| 처리 지연 | 40% 감소 (25-45ms → 10-30ms) |
| 감시 해상도 | 19% 향상 (56% → 75%) |
| 추적 안정성 | 1.8배 개선 (6.2초 → 11.3초) |
| 대역폭 | 99.8% 절감 (600-1200MB → 1.2MB) |
| 배터리 지속 | 6-12배 개선 (10시간 → 60-125시간) |
기술적 기여 🏆
- 새로운 성능 지표: 기존의 QoS 메트릭으로는 측정 불가능한 “감시 해상도(SR)”의 도입
- 계층적 아키텍처 혁신: LEO-HAP-LAP 3계층 구조의 최적 설계
- 경량 프로토콜: 500배 이상 데이터 압축의 실현
- 동적 최적화: 실시간 이동 패턴에 적응하는 재할당 컨트롤러
실무적 영향 🌍
- 자율 로지스틱: 장시간 안정적 배송 추적
- 항공 통신: 오지 지역 서비스 확대
- 재난 관리: 구조 미션의 신뢰도 향상
- IoT 확대: 광대역 엣지 센싱 네트워크 가능
시장 전망 📈
이 기술이 상용화되면:
- 위성 통신 시장: 기존의 고비용, 낮은 신뢰도 문제 해결
- 자율 시스템 산업: 배송, 항공, 로봇 등의 대규모 배포 가능
- 글로벌 연결성: 지상 인프라가 없는 지역도 실시간 서비스 제공
📚 더 알아보기
이 논문에서 다루는 주요 개념들:
- 위성 통신 표준: ITU-R, 3GPP NR-NTN, ETSI
- 네트워크 아키텍처: 엣지 컴퓨팅, 분산 처리
- 최적화 기법: 선형 계획법, 휴리스틱 알고리즘
- 성능 분석: 대기행렬 이론(M/M/1 큐), 신뢰도 구간
🎯 핵심 메시지: 위성 네트워크는 더 이상 “느리고 비싼” 기술이 아닙니다. HBT 기술을 통해 빠르고, 안정적이고, 효율적인 글로벌 인프라로 진화하고 있습니다. 🚀