📚 논문 정보
이 글의 기반이 되는 논문 정보를 먼저 소개해드릴게요!
제목: 지능형 교통 시스템(ITS) 적용을 위한 과속 단속 카메라 기반 도로 디지털 트윈 설계
영문 제목: Digital Twin Design of Speed Camera-Based Roads for Intelligent Transportation System (ITS) Applications
👨💼 저자: 김민수, 김형진, 김현범*
🏫 소속: 인천대학교 임베디드시스템공학과
📧 연락처: rlaalstn19@inu.ac.kr
✉️ 교신저자: 김현범
🎓 발행 정보: 이 논문은 과학기술정보통신부 및 정보통신기획평가원의 학석사연계 ICT 핵심인재양성사업의 연구결과입니다
🎯 논문의 핵심 아이디어
이 논문은 매우 흥미로운 주제를 다루고 있어요! 바로 과속 단속 카메라의 영상을 이용해서 가상의 도로 환경(디지털 트윈)을 만들고 그 안에서 실제 과속 단속을 시뮬레이션하는 것입니다. 📹🚗
쉽게 말해 우리가 매일 지나가는 도로를 가상 세계에 똑같이 재현해서 다양한 교통 시스템을 테스트할 수 있다는 거예요. 이건 정말 혁신적인 접근 방식입니다!
🚦 지능형 교통 시스템(ITS)이 정말 필요할까요?
현대의 도로는 점점 더 복잡해지고 있어요. 매년 교통사고가 증가하고, 도시의 교통 혼잡도 심각해지고 있습니다. 이를 해결하기 위해 등장한 것이 바로 지능형 교통 시스템(ITS, Intelligent Transportation System)이에요.
🔗 ITS가 가능하게 해주는 것들:
- 차량-차량 통신(V2V) 🚗↔️🚗: 차량들이 서로 정보를 주고받으며, 앞에 차량이 급제동할 때 뒷차가 미리 알고 대응할 수 있어요
- 차량-인프라 통신(V2I) 🚗↔️🛣️: 도로 기반 시설(신호등, 안내판 등)과 차량이 통신하면서 최적의 경로를 제시하고 신호를 조절할 수 있어요
🌟 ITS의 놀라운 효과들:
- 🛑 사고 위험 감소: 실시간으로 위험 상황을 감지하고 운전자에게 알려줘요
- 🚦 스마트 신호 제어: 도로 상황에 따라 신호 시간을 자동으로 조절해요
- 💨 교통 혼잡 완화: 교통량을 균형있게 분배해서 도로가 더 원활해져요
💡 하지만 여기엔 큰 문제가 있었어요…
새로운 교통 정책이나 기술을 실제로 적용하려면, 실제 도로에서 테스트해야 합니다. 하지만 이건 정말 어렵고 비용이 많이 들어요. 😅
기존의 문제점:
- 💰 막대한 물질적 비용: 시험용 도로 구축, 신호등 설치 등
- 🤑 엄청난 금전적 비용: 수십억 원 이상 들 수 있어요
- ⏰ 엄청난 시간 소모: 설계부터 완공까지 수년이 걸릴 수 있어요
✨ 해결 방안: 디지털 트윈 기술!
디지털 트윈(Digital Twin)은 현실의 데이터를 실시간으로 수집해서, 물리적인 물체를 가상 환경에서 똑같이 재현하는 기술이에요. 마치 메타버스처럼, 가상의 도로에서 다양한 시나리오를 시뮬레이션할 수 있다는 거죠!
디지털 트윈의 장점들:
- 🎮 도로의 흐름과 인프라 상태를 가상으로 구현할 수 있어요
- 💸 비용을 극적으로 절감할 수 있어요
- 🧪 다양한 교통 시나리오를 자유롭게 실험할 수 있어요
- ✅ 신규 정책/기술을 도입하기 전에 효과를 미리 검증할 수 있어요
📹 왜 과속 단속 카메라를 활용했을까요?
좋은 질문이에요! 이 논문이 과속 단속 카메라에 주목한 이유는 정말 실용적이거든요.
과속 단속 카메라의 장점:
- 🌐 이미 많이 설치되어 있어요: 국도, 고속도로 등 전국 곳곳에 설치되어 있어요
- 🆓 추가 인프라가 필요 없어요: 새로운 카메라나 센서를 설치할 필요가 없어요
- 📊 실시간 데이터를 얻을 수 있어요: 실제 차량의 움직임을 영상으로 기록하고 있어요
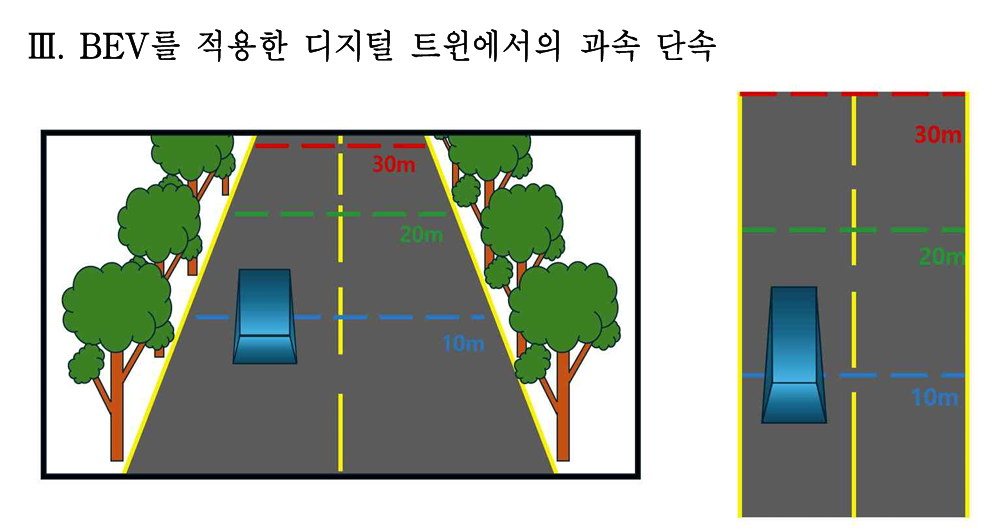
- 🏗️ Bird’s Eye View(BEV) 환경을 쉽게 구성할 수 있어요: 도로 상황을 위에서 본 관점의 영상으로 변환할 수 있어요
이건 정말 똑똑한 접근 방식이에요! 이미 존재하는 인프라를 최대한 활용하면서, 추가 비용을 최소화한 거니까요.
🔄 역원근 변환(IPM): 가장 핵심적인 기술
이제 본격적인 기술 이야기에 들어가볼게요! 이 논문의 심장이라고 할 수 있는 기술이 바로 역원근 변환(Inverse Perspective Mapping, IPM)입니다.
먼저 원근법(Perspective)을 이해해봅시다
우리가 카메라나 눈으로 볼 때, 가까운 것은 크게 보이고 먼 것은 작게 보여요. 이를 원근 왜곡(perspective distortion)이라고 해요.
예를 들어, 도로를 카메라가 정면으로 촬영하면:
- 🚗 가까운 차량: 크게 보여요
- 🚗 먼 차량: 아주 작게 보여요
이건 우리 눈에는 자연스럽지만, 컴퓨터가 속도를 측정하려면 문제가 돼요!
✨ 역원근 변환이 하는 일
역원근 변환은 이 원근 왜곡을 제거해서, 마치 하늘에서 새가 내려다보는 것처럼 도로를 표현해요. 이를 Bird’s Eye View(BEV)라고 합니다.
🧮 역원근 변환의 수식
수식으로 표현하면:
[u'] [u]
[v'] ∝ H [v]
[1 ] [1]
어떤 의미일까요?
- (u, v): 원본 사진의 픽셀 좌표
- (u’, v’): 변환된 BEV 사진의 픽셀 좌표
- H: 호모그래피 행렬(Homography Matrix) – 두 이미지 사이의 기하학적 관계를 나타내는 3×3 행렬이에요
📐 호모그래피 행렬은 어떻게 계산할까요?
이 과정이 정말 흥미로워요!
- 특징점 추출 🔍: 원본 사진에서 도로 평면상의 4개의 특징점(예: 도로의 모서리 4개)을 찾아요
- 대응점 결정 🎯: BEV에서 이 점들이 어디로 매핑될지 결정해요
- 행렬 계산 🧮: 특이값 분해(SVD)라는 선형대수 기법을 사용해서 호모그래피 행렬 H를 계산해요
- 좌표 변환 ✨: 계산된 H를 사용해서 모든 픽셀을 BEV 좌표로 변환해요
이렇게 하면, 원래는 왜곡되어 있던 도로 영상이 완벽한 탑-다운 뷰로 변환돼요!
🦅 Bird’s Eye View(BEV): 새의 눈으로 세상 보기
BEV(Bird’s Eye View)는 이 연구의 핵심 개념이에요. 이게 정확히 뭔지 이해하면 논문의 절반은 이해한 거예요!
BEV의 특징:
- 🦅 새가 하늘에서 내려다보듯: 도로를 위에서 본 관점이에요
- 📏 일관된 크기로 표현: 거리에 관계없이 같은 크기로 물체를 표현해요
- ⬆️ 높이 정보는 무시: BEV는 2D 평면이므로 차량의 높이는 생각하지 않아요
BEV의 장점들:
- ✅ 차량의 절대적 위치를 정확하게 파악: 각 차량이 도로의 정확히 어디에 있는지 알 수 있어요
- 📐 거리 측정과 속도 계산이 정확: 픽셀 거리가 실제 거리에 정확하게 대응돼요
- 🎮 시뮬레이션이 쉬워져요: 컴퓨터가 처리하기 쉬운 형태의 데이터가 돼요
🏗️ 디지털 트윈 환경 설계: 세부사항
이제 연구팀이 어떻게 가상의 도로를 만들었는지 알아봅시다!
🚙 Car Block: 차량을 표현하는 방법
역원근 변환을 적용할 때 흥미로운 문제가 발생해요. 바로 차량이 본래보다 길어진다는 거예요! 원근 왜곡을 제거하는 과정에서 차량이 늘어나버리는 거예요.
이를 해결하기 위해 연구팀은 Car Block이라는 개념을 도입했어요:
- 정의: 실제 차량의 길이와 폭을 정확히 반영하는 직사각형 블록
- 기준 차량: 전장 4,600mm, 전폭 1,800mm인 일반 승용차를 기준으로 했어요
- 측정 기준점: 차량 전체의 중심점이 아니라, 차량의 앞선(Front edge)을 기준으로 사용해요
왜 앞선을 기준으로 할까요? 🤔 앞선이 가장 안정적인 특징점이고, 역원근 변환의 영향을 가장 적게 받거든요!
📐 디지털 도로의 규격
가상의 도로는 이렇게 설계되었어요:
| 항목 | 규격 | 설명 |
|---|---|---|
| 도로 길이 | 10m, 20m, 30m | 기준선을 표시해서 거리를 측정해요 |
| 도로 폭 | 4.5m | 실제 도로 폭을 반영했어요 |
| 변환 후 픽셀 | 1,080px × 162px | BEV 변환 후의 해상도예요 |
| 픽셀-거리 변환 | 1px = 2.78cm | 이게 정말 중요한 값이에요! |
🎯 정확성 검증: 오차율이 겨우 1%!
연구팀은 변환된 디지털 환경이 실제 도로를 정확하게 반영했는지 검증했어요:
| 구간 | 실제 거리 | 픽셀 표현 | 계산된 거리 | 오차 |
|---|---|---|---|---|
| 10m 지점 | 10m | 370px | 10.29m | ±2.9% |
| 20m 지점 | 20m | 360px | 10.02m | ±0.2% |
| 30m 지점 | 30m | 350px | 9.73m | ±2.7% |
| 전체 평균 | – | – | – | ±1% |
놀라울 정도로 정확하지 않나요? 이는 역원근 변환 기술이 얼마나 정교한지를 보여줍니다! ✨
🏃♂️ 속도 측정 알고리즘: 과속 단속의 핵심
이제 가장 흥미로운 부분이에요 – 실제로 과속을 측정하는 방법이요!
📹 측정 환경 설정
- 프레임율(FPS): 15fps – 초당 15장의 사진을 분석해요
- 기준점: 차량의 앞선(front edge) – 가장 정확한 측정을 위해서예요
- 측정 시간: 14프레임 / 15fps ≈ 약 0.93초
🎬 속도 측정 프로세스: 단계별로 알아봅시다
1️⃣ 첫 프레임 결정
차량이 단속 구역에 처음 들어오는 순간의 위치를 기록해요:
- 위치: y = y₀
2️⃣ 기준 프레임 설정
차량이 감지된 후 10프레임을 기다려요. 왜일까요? 초기의 불안정한 감지를 피하기 위함이에요! 🎯
3️⃣ 최종 프레임 측정
기준 프레임으로부터 14프레임 후의 위치를 측정해요:
- 위치: y = y’
🧮 속도 계산 공식: 신기한 수학이에요!
Step 1: 픽셀 이동량 계산
픽셀 이동량 = y' - y (픽셀 단위)
Step 2: 실제 이동 거리 계산
실제 이동 거리(cm) = 픽셀 이동량 × 2.78 cm/px
Step 3: 최종 속력 계산 🚗
속력(km/h) = (y' - y) × 2.78(cm/px) × 3,600(s/h) / 100,000(km/cm)
각 요소의 의미:
- 2.78(cm/px): 우리가 이미 계산한 픽셀-거리 변환 비율
- 3,600(s/h): 0.93초(약 14프레임)를 1시간으로 환산하는 것
- 100,000(km/cm): 센티미터를 킬로미터로 변환
예를 들어, 차량이 14프레임 동안 200픽셀 이동했다면:
속력 = 200 × 2.78 × 3,600 / 100,000 = 약 50km/h
정확하고 우아한 공식이에요! ✨
🚗 실험 설정 및 놀라운 결과
이제 연구팀이 실제로 실험을 진행한 내용을 봐봅시다!
🧪 실험 조건
- 단속 구역 제한 속도: 시속 50km/h (일반적인 도시 도로 제한 속도)
- 테스트 차량: 3대 (차량 A, B, C)
- 영상 데이터: 실제 과속 단속 카메라 영상 – 이게 정말 중요해요!
- 측정 환경: 서로 다른 환경에서 촬영된 차량 영상들
🎉 실험 결과: 완벽한 성공!
정성적 결과 ✅
디지털 트윈 환경에서의 과속 측정 결과:
- 차량 A 🚗: 시속 50km/h 이하의 적정 속도로 주행 ✓
- 차량 B 🚗: 시속 50km/h 이하의 적정 속도로 주행 ✓
- 차량 C 🚗: 시속 50km/h 이하의 적정 속도로 주행 ✓
모든 차량이 제한 속도를 준수하고 있었어요!
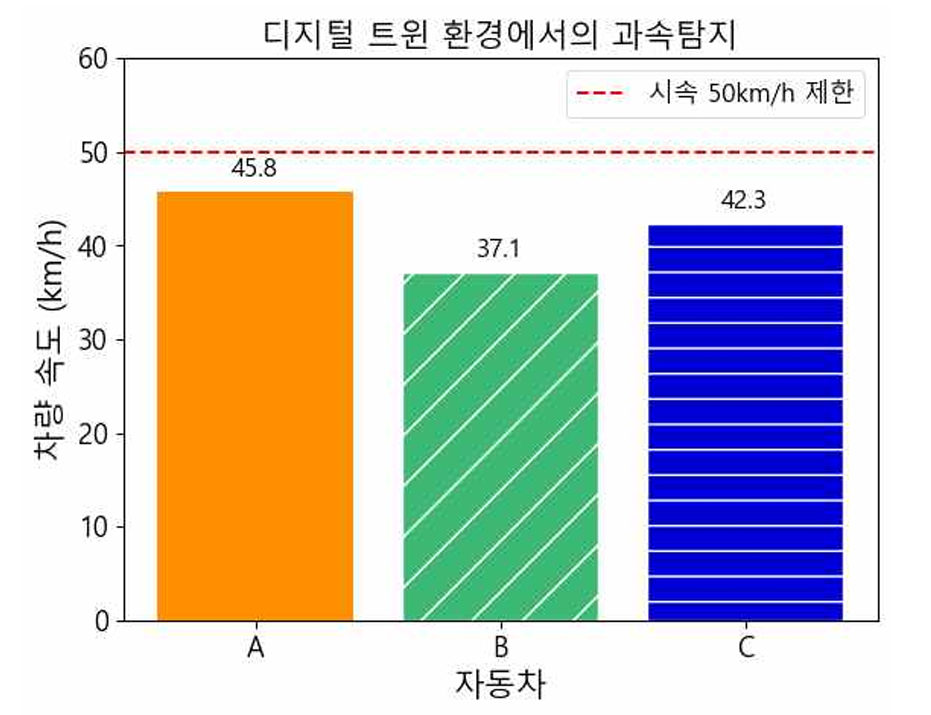
정량적 결과 📊
놀라운 정확도를 보여줬어요:
- 🎯 디지털 환경 구성 오차율: 약 1% 수준 (신뢰성 검증 완료)
- 📏 과속 단속 측정 정확도: 실제 차량 규격 기반 설정으로 높은 정확도 달성
이는 이론이 실제로 작동한다는 것을 증명했어요! 🎊
🏆 이 연구가 주는 3가지 중요한 의미
- 과속 단속 카메라로 디지털 트윈을 만들 수 있다는 것을 입증했어요 ✅
- 실제 환경에서의 검증을 완료했어요 ✅
- ITS 플랫폼으로 확장할 수 있는 가능성을 보여줬어요 ✅
🚀 향후 발전 가능성: 미래는 밝아요!
연구팀은 이 논문에서 다음과 같은 방향으로 확장할 수 있다고 제안했어요:
🚙 Car Block 다양화
현재는 일반 승용차(4,600mm × 1,800mm) 한 가지만 적용했어요. 앞으로는:
- SUV, 버스, 트럭 등 다양한 차량 규격 추가
- 각 차량 타입별로 정확한 측정 가능
📷 다양한 화각(Camera Angle) 적용
- 현재는 단일 카메라 각도에서만 테스트했어요
- 다양한 설치 각도에서도 작동하도록 일반화 필요
- 고속도로의 다양한 위치에서도 적용 가능하게!
🚦 ITS 기능 확대: 무한한 가능성!
과속 단속뿐 아니라 훨씬 다양한 것들을 할 수 있어요:
- 🔴 신호 최적화: 교통량에 따라 신호 시간 자동 조절
- 📊 교통량 분석: 시간대별 교통량 파악
- ⚠️ 사고 예측: 위험한 상황 미리 감지
- 🚘 자율주행차 테스트: 차량-인프라 통신 검증
💡 핵심 기술 한눈에 보기
| 기술 | 설명 | 역할 |
|---|---|---|
| 역원근 변환(IPM) 🔄 | 원근 왜곡을 제거해서 BEV 생성 | 기술의 심장 |
| Bird’s Eye View(BEV) 🦅 | 새의 눈처럼 도로를 위에서 봐요 | 측정의 기반 |
| 호모그래피 행렬 📐 | 두 평면 사이의 기하학적 변환 | 수학적 기반 |
| Car Block 🚗 | 실제 차량 규격을 반영하는 블록 | 정확성 확보 |
| SVD (특이값 분해) 🧮 | 호모그래피 행렬을 계산하는 기법 | 계산 방법 |
📊 성능 지표 종합
🎯 역원근 변환의 정확성
도로 30m을 디지털 환경으로 변환했을 때:
- 변환 비율: 1px당 2.78cm
- 전체 오차: ±1% (약 27.8cm)
이는 자동차 길이(약 4.6m)의 오차 범위보다 훨씬 작아요! 🎉
⚡ 속도 측정의 신뢰성
- 측정 환경: 15fps로 0.93초 동안 측정
- 기준점: 차량의 앞선(가장 안정적)
- 정확도: 실제 차량 규격 기반으로 높은 정확성 달성
🎓 마무리: 이 논문이 위대한 이유
이 연구는 매우 현실적이면서도 혁신적이에요:
✨ 현실적인 이유:
- 이미 존재하는 인프라(과속 단속 카메라)를 활용했어요
- 추가 설치 비용이 거의 없어요
- 실제 도로 데이터를 사용했어요
✨ 혁신적인 이유:
- 디지털 트윈 기술을 교통 시스템에 처음으로 적용했어요
- 향후 무수한 ITS 기능을 테스트할 수 있는 플랫폼을 만들었어요
- 비용을 극적으로 절감하면서 효과를 입증할 수 있는 방법을 제시했어요
앞으로 자율주행차, 스마트 시티, V2V/V2I 통신 등이 모두 이런 디지털 트윈 환경에서 먼저 테스트된 후 실제 도로에 적용될 거예요. 이 논문은 그런 미래 교통 시스템의 발판을 마련한 거라고 볼 수 있어요! 🚀
🔑 기억해야 할 핵심 개념 3가지
1️⃣ 역원근 변환(IPM)
카메라 원근으로 인한 왜곡을 제거해서, 새가 위에서 본 것처럼 도로를 표현하는 기술이에요.
2️⃣ Bird’s Eye View(BEV)
높이 정보 없이 거리에 관계없이 일관된 크기로 물체를 표현하는 2D 뷰예요.
3️⃣ Car Block
실제 차량의 규격을 반영해서, 정확한 속도 측정을 가능하게 하는 개념이에요.
이 세 가지가 삼위일체를 이루어서 정확한 과속 단속을 가능하게 했어요! 🎯
🌟 생각해볼 질문들
- 🤔 만약 다른 종류의 카메라(CCTV, 대시캠 등)도 활용한다면?
- 🤔 이 기술로 운전자의 운전 습관을 분석할 수 있을까?
- 🤔 악천후(비, 눈 등)에서도 이 기술이 작동할까?
- 🤔 자율주행차의 시뮬레이션에도 활용할 수 있을까?
이런 질문들이 향후 연구의 방향이 될 수 있어요! 🚀
지금까지 과속 단속 카메라 기반 디지털 트윈 설계에 대해 알아봤어요. 복잡한 수학과 컴퓨터 비전 기술이지만, 결국은 우리의 일상 속 교통 안전을 만드는 데 기여한다는 게 정말 멋지지 않나요?
앞으로의 스마트 교통 시스템이 기대돼요! 🚗💨✨